1.1. 项目目标
基于甲方提供的技术要求进行标定间场地建设、车辆摆正器设计及调试、标定间场地平面设计、周视标靶设计、环视标靶设计、
1.2. 项目内容
承接甲方标定间项目的乙方将负责以下内容:
(1)标定间场地建设,
(2)车辆摆正器,
(3)标定间场平面设计图,
(4)周视标靶,
(5)环视标靶设计,
(6)长焦标靶设计,
(7)激光标靶设计,
1. 技术要求
2.1. 功能性需求
2.1.1. 标定间功能技术要求
2.1.1.1 标定需求
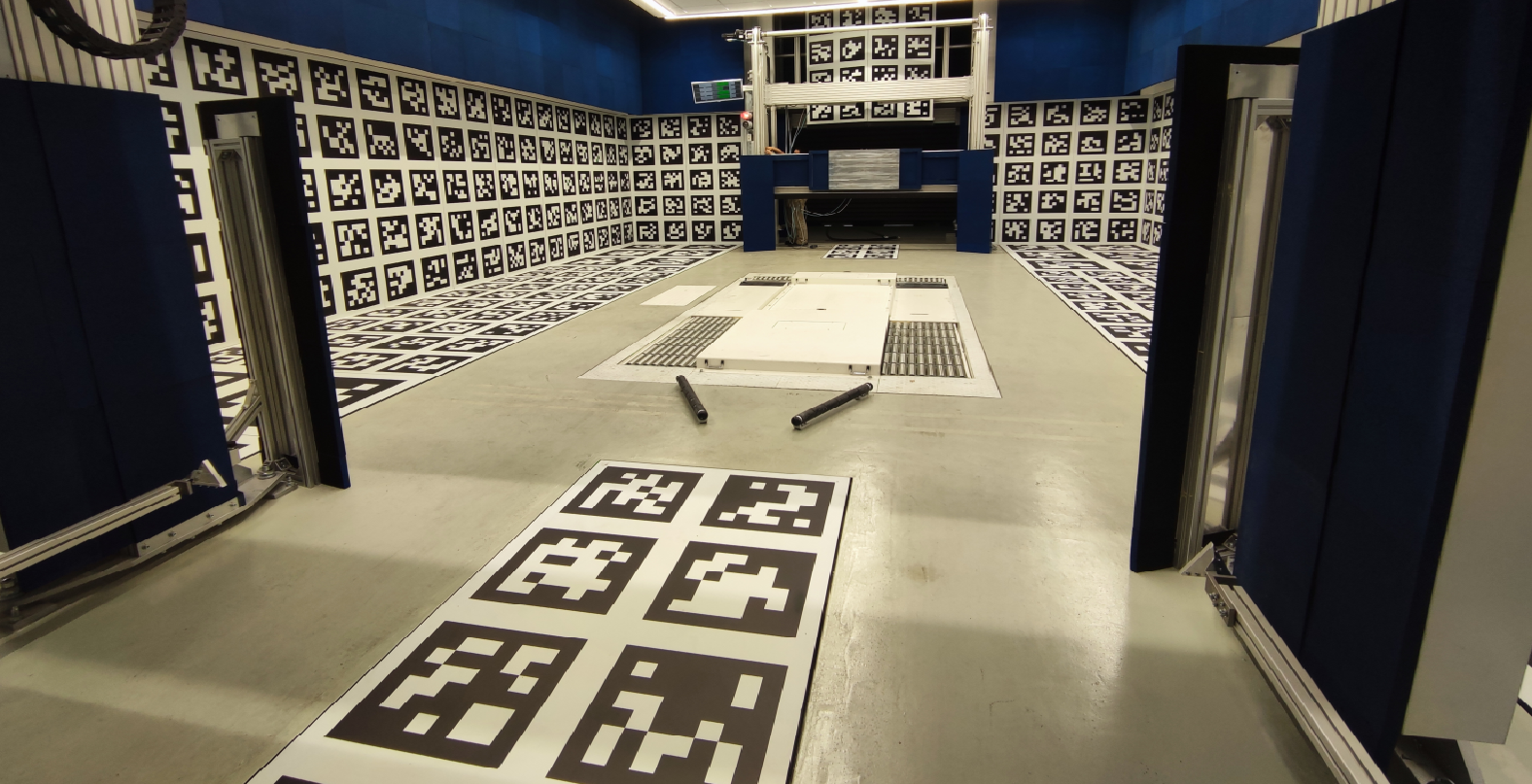
针对高中低阶三个平台部署的传感器进行标定间整车外参标定,也称之为EOL标定,待标定传感器类型包含广角相机,窄角相机,鱼眼相机,激光雷达。该标定间需要满足为上述传感器提供足够的标定观测,以保证传感器的精准外参标定
不同相机传感器标定原理基本类似,首先摆正器定位车辆在标定间中的位置,再通过相机检测到Ariltag、棋盘格等标志物,提取图像中的角点像素信息,已知相机内参以及角点在车体坐标系(后轴中心或者其他位置)中的3D坐标,通过3D-2D姿态求解算法计算相机与车体坐标的相对位姿。
针对激光雷达类sensor,如机械旋转式激光雷达、混合固态激光雷达(即半固态雷达)、固态激光雷达等,EOL标定算法原理基本类似,首先摆正器定位车辆在标定间中的位置,再通过激光雷达检测到标志物,提取其中的特征点3D信息,已知角点在车体坐标系(后轴中心或者其他位置)中的3D坐标,通过3D-3D姿态求解算法计算激光雷达与车体坐标的相对位姿。
控制器标定节拍要求:1、激光雷达标定≤40s。2、前视标定和周视标定≤40s。3、环视标定≤20s。3、EDC 内置全景标定:≤20s。
2.1.2. 标定间设计技术要求
2.1.2.1 标定间场地要求
场地空间26000mm*8000mm*3500mm,地面要求水平且平坦,地平与重力水平面对齐,可使用砂浆/环氧树脂自流平等进行处理,表面耐磨/不明显反光(反光率在18%左右)。
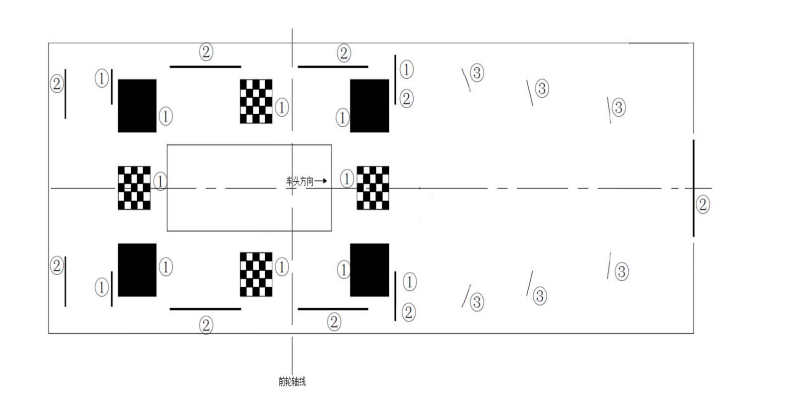
1.2.2 车辆定位参考方案 在车辆定位参考方案(本节称本方案)中,定位(对中)装置的作用是快速定位待标定车辆。 本方案中,前轮定位采用嵌入式卡位固定前轮并保持车辆前后方向不动;后轮定位采用横向移动滚 轮。 定位装置的前后,沿车轮行驶方向,两侧设置有纵向导向轮,防止车辆开偏。定位(对中)装 置前轮部分左右盖板上设置有两组对射式光电开关,用以判断车辆前轮是否置于定位装置前轮部分 横向中心线上。对中装置前轮部分左前轮位置设置有前后两块的横向定位块,用以对车辆前轮的初 步定位。当车辆左前轮驶入横向定位块之间时,电气控制系统控制定位装置对车辆进行对中摆正, 使车辆的纵向中心线与定位装置纵向中心线重合。